14. Lesson: Cảm biến siêu âm
Giới thiệu
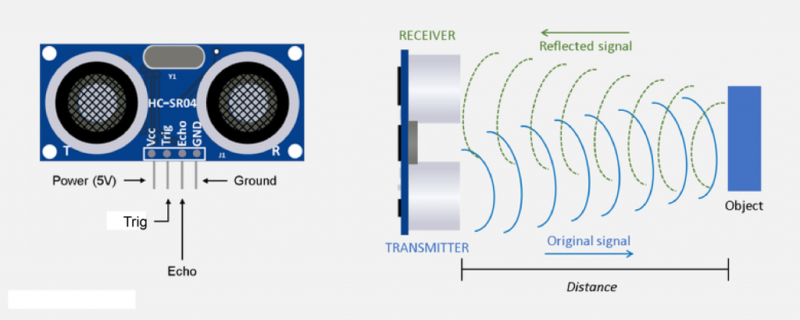
Cảm biến siêu âm gửi ra một xung âm thanh tần số cao và sau đó tính toán thời gian cần thiết để tiếng vang của âm thanh phản xạ trở lại. Cảm biến có 2 lỗ ở mặt trước. Một lỗ mở truyền sóng siêu âm, lỗ còn lại nhận chúng. Trong bài học này, chúng tôi sẽ hướng dẫn bạn cách hoạt động của Cảm biến siêu âm HC-SR04 và cách sử dụng nó với micro bit.
Lưu ý: Hướng dẫn này dành cho HC-SR04 5v.
Bộ phận cần thiết
1x vi:bit
1x Cáp USB Micro B
Đột phá 1x micro:bit (có Tiêu đề)
1x Bảng mạch
Dây nhảy 5x
Mô-đun cảm biến siêu âm 1x
Giới thiệu về cảm biến siêu âm HC-SR04
Tính năng của HC-SR04
Nguồn điện :+5V DC
Dòng điện tĩnh: <2mA
Dòng điện làm việc: 15mA
Góc hiệu dụng: <15°
Khoảng cách đo: 2cm – 400 cm/1” – 13ft
Độ phân giải: 0,3cm
Góc đo: 30 độ
Độ rộng xung đầu vào kích hoạt: 10uS
Kích thước: 45mm x 20mm x 15mm
Cảm biến siêu âm là gì?
Cảm biến siêu âm là thiết bị có thể đo khoảng cách đến vật thể bằng cách sử dụng sóng âm thanh. Nó đo khoảng cách bằng cách phát ra một sóng âm thanh ở một tần số cụ thể và lắng nghe sóng âm thanh đó dội ngược lại. Bằng cách ghi lại thời gian trôi qua giữa sóng âm được tạo ra và sóng âm dội lại, có thể tính được khoảng cách giữa cảm biến sonar và vật thể.
HC-SR04 là gì?
Cảm biến siêu âm HC-SR04 sử dụng sóng siêu âm để xác định khoảng cách đến vật thể giống như loài dơi. Nó cung cấp khả năng phát hiện phạm vi không tiếp xúc tuyệt vời với độ chính xác cao và số đọc ổn định trong một gói dễ sử dụng. Từ 2 cm đến 400 cm hoặc 1” đến 13 feet. Hoạt động của nó không bị ảnh hưởng bởi ánh sáng mặt trời hoặc vật liệu đen như máy đo khoảng cách Sharp (mặc dù có thể khó phát hiện các vật liệu mềm về âm thanh như vải). Nó đi kèm với mô-đun máy phát và máy thu siêu âm.
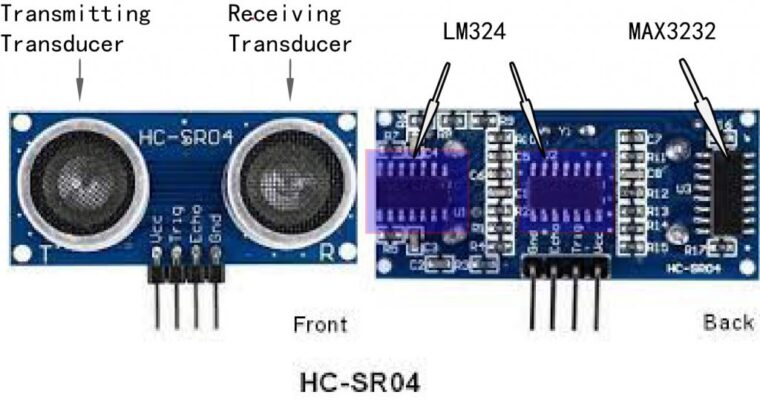
Ở mặt trước của máy đo xa siêu âm là hai ống trụ kim loại. Đây là những bộ chuyển đổi. Đầu dò chuyển đổi lực cơ học thành tín hiệu điện. Trong máy đo phạm vi siêu âm có đầu dò phát và đầu dò thu. Bộ chuyển đổi truyền chuyển đổi tín hiệu điện thành xung siêu âm và bộ chuyển đổi nhận chuyển đổi xung siêu âm phản xạ trở lại thành tín hiệu điện. Nếu bạn nhìn vào mặt sau của công cụ tìm phạm vi, bạn sẽ thấy một IC phía sau bộ chuyển đổi truyền có nhãn MAX3232. Đây là IC điều khiển bộ chuyển đổi truyền tín hiệu. Đằng sau bộ chuyển đổi thu là một IC có nhãn LM324. Đây là một Op-Amp bốn khuếch đại tín hiệu do bộ chuyển đổi thu tạo ra thành tín hiệu đủ mạnh để truyền tới Arduino.
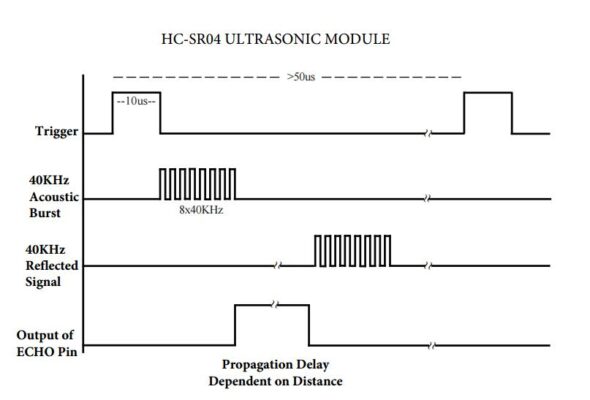
Sơ đồ thời gian
Sơ đồ thời gian của HC-SR04 được hiển thị. Để bắt đầu đo, Trig của SR04 phải nhận được xung cao (5V) trong ít nhất 10us, điều này sẽ khởi động cảm biến sẽ truyền ra 8 chu kỳ xung siêu âm ở tần số 40kHz và chờ xung siêu âm phản xạ. Khi cảm biến phát hiện siêu âm từ máy thu, nó sẽ đặt chân Echo ở mức cao (5V) và độ trễ trong một khoảng thời gian (chiều rộng) tỷ lệ với khoảng cách. Để có được khoảng cách, hãy đo chiều rộng (Ton) của chân Echo.
Thời gian = Độ rộng xung Echo, tính bằng us (micro giây)
Khoảng cách tính bằng centimét = Thời gian/58
Khoảng cách tính bằng inch = Thời gian / 148
Hoặc bạn có thể sử dụng tốc độ của âm thanh, vì đã biết rằng âm thanh truyền trong không khí với tốc độ khoảng 344 m/s (1129 ft/s), bạn có thể dành thời gian để sóng âm quay trở lại và nhân nó với 344 mét (hoặc 1129 feet) để tìm tổng khoảng cách khứ hồi của sóng âm. Chuyến đi khứ hồi có nghĩa là sóng âm truyền đi gấp 2 lần khoảng cách đến vật thể trước khi được cảm biến phát hiện; nó bao gồm 'chuyến đi' từ cảm biến siêu âm đến vật thể VÀ 'chuyến đi' từ vật thể đến cảm biến siêu âm (sau khi sóng âm bật ra khỏi vật thể). Để tìm khoảng cách đến vật thể, chỉ cần chia khoảng cách khứ hồi làm đôi.

Biến thời gian là thời gian để xung siêu âm rời khỏi cảm biến, bật ra khỏi vật thể và quay trở lại cảm biến. Trên thực tế, chúng tôi chia thời gian này làm đôi vì chúng tôi chỉ cần đo khoảng cách đến vật thể chứ không phải khoảng cách đến vật thể và quay lại cảm biến. Biến tốc độ là tốc độ âm thanh truyền trong không khí. Tốc độ truyền âm trong không khí thay đổi theo nhiệt độ và độ ẩm. Vì vậy, để tính toán chính xác khoảng cách, chúng ta cần xét đến nhiệt độ và độ ẩm xung quanh. Công thức tính tốc độ truyền âm trong không khí khi tính đến nhiệt độ và độ ẩm là:
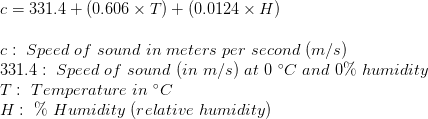
Ví dụ, ở nhiệt độ 20°C và độ ẩm 50%, âm thanh truyền đi với tốc độ:
Ghi chú:
Điều quan trọng là phải hiểu rằng một số vật thể có thể không được phát hiện bằng cảm biến siêu âm. Điều này là do một số vật thể được định hình hoặc định vị sao cho sóng âm thanh bật ra khỏi vật thể nhưng bị lệch khỏi cảm biến Siêu âm. Cũng có thể vật thể quá nhỏ không thể phản xạ đủ sóng âm trở lại cảm biến để phát hiện. Các vật thể khác có thể hấp thụ tất cả sóng âm thanh (vải, thảm, v.v.), điều đó có nghĩa là không có cách nào để cảm biến phát hiện chúng một cách chính xác. Đây là những yếu tố quan trọng cần xem xét khi thiết kế và lập trình robot sử dụng cảm biến siêu âm.
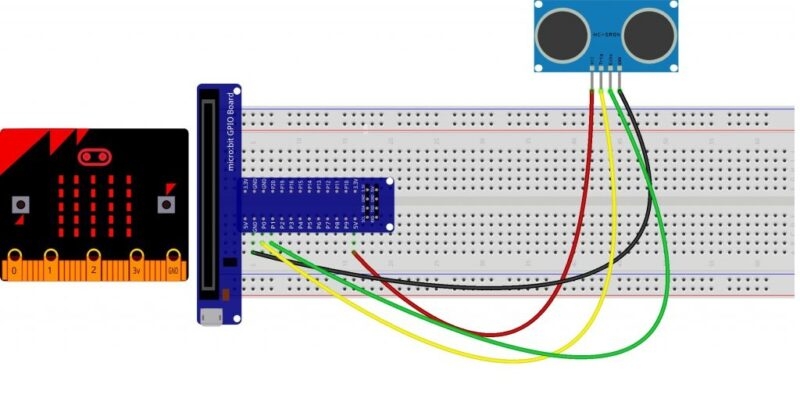
Sơ đồ nối dây cho thí nghiệm
Bạn có thể tham khảo cột bên dưới để biết kết nối giữa mô-đun siêu âm và micro bit:
Thiết bị cảm biến sóng siêu âm
Đột phá Microbit
VCC
5v
GND
GND
Lượng giác
P0
Tiếng vọng
P1
Chạy tập lệnh của bạn
Nếu bạn không quen với việc viết mã, đừng lo lắng. Đầu tiên, bạn có thể nhập liên kết này: https://makecode.microbit.org/reference để lấy tham chiếu về khối microbit.
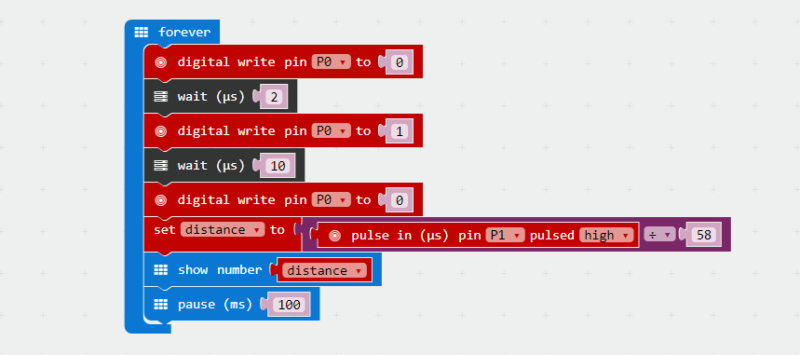
Sao chép và dán hoặc tạo lại mã sau vào trình soạn thảo MakeCode của riêng bạn bằng cách nhấp vào biểu tượng mở ở góc trên bên phải của cửa sổ trình soạn thảo. Bạn cũng có thể tải xuống ví dụ này bằng cách nhấp vào nút tải xuống ở góc dưới bên phải của cửa sổ mã.
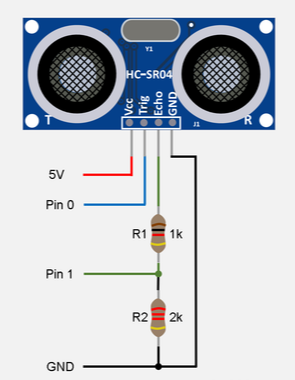
THẬN TRỌNG Khi nhận được xung dội lại, cảm biến siêu âm sẽ gửi tín hiệu “cao” đến Chân 1 của mcro:bit được định mức ở mức 5v. Chân GPIO trên micro:bit được đánh giá ở mức 3,3v, nghĩa là mặc dù giải pháp trên sẽ hoạt động nhưng làm như vậy có thể làm hỏng các chân GPIO trên micro:bit của bạn – điều mà chúng tôi muốn tránh! Để bảo vệ micro:bit của bạn khỏi những tổn hại có thể xảy ra, chúng tôi có thể hạ thấp điện áp truyền đến micro:bit thông qua chân echo bằng cách tạo một bộ chia điện áp bằng hai điện trở.
Tạo bộ chia điện áp
Một bộ chia điện áp bao gồm hai điện trở (R1 và R2) mắc nối tiếp. Trong trường hợp của chúng tôi, chúng tôi muốn giảm mức 5v được trả về từ chân echo xuống còn 3,3v – phù hợp hơn cho micro:bit của chúng tôi.Tuy nhiên, loại điện trở nào
Cấu hình Các điện trở của chúng ta cần được mắc nối tiếp. Xem hình bên phải.
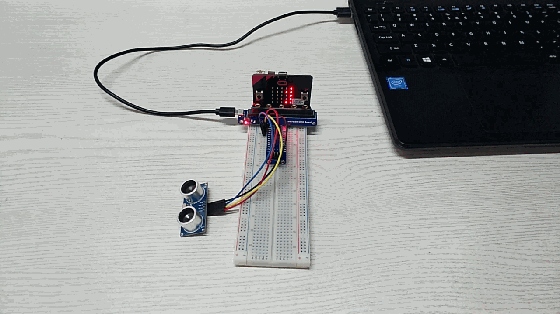
Mặc dù có thể đạt được cấu hình trên bằng cách sử dụng kẹp cá sấu, nhưng tôi thấy việc sử dụng bảng mạch và dây nhảy sẽ dễ dàng hơn nhiều. Xem ví dụ dưới đây.
Kết quả
Bây giờ bạn đã tạo thành công một bộ thiết bị đo siêu âm. Hướng đầu siêu âm vào đối tượng bạn muốn kiểm tra, sau đó bạn sẽ thấy khoảng cách giữa trên ma trận LED.
Last updated